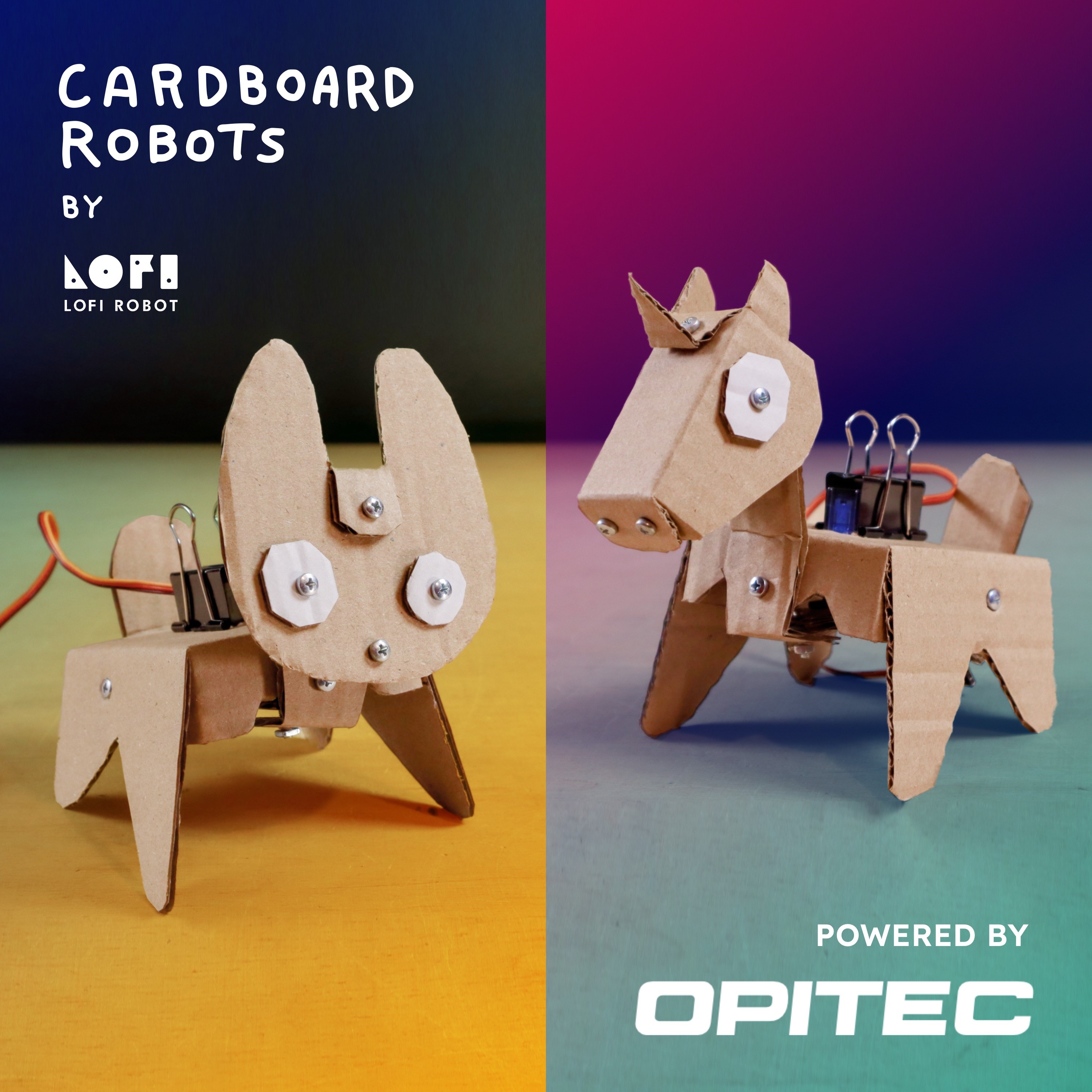
Hongerige robot & vermoeide robot



Bouwen en programmeren van interactieve kartonnen robots met Calliope en LOFI Roots
In dit project bouwen leerlingen hun eigen mobiele "Hongerige" of "Vermoeide" robot op basis van de LOFI Roots modellen. Het hoofd of de kaak wordt mechanisch gebouwd en bewogen met een 180° servomotor. Alles wordt bestuurd met de Calliope mini - aanvankelijk met een druk op de knop, later via sensoren zoals licht, magnetische kracht of volume, waardoor een interactief object ontstaat dat reageert op zijn omgeving.
Mechanica, ontwerp en programmering zijn zichtbaar met elkaar verweven - en abstracte code wordt echte beweging.
Callipe & Lofi bieden kant-en-klare lesdia's (PPT), MakeCode-voorbeelden en video-instructies voor elke projectstap. NAAR HET ONDERWIJSCONCEPT
Geschikt voor:
vanaf kassa: 5+
Leeftijd 11+
Knutselen & Technologie
MINT
Ruimte voor de maker
Tijdsbestek:
4-6 lessen
Leergebied:
- Constructie met karton
- Mechanische bewegingsoverdracht
- Servomotoren besturen
- Gebeurtenis- en statuslogica
- Sensoren (licht, magnetometer, volume)
- Problemen oplossen en debuggen
Wat wordt er onderwezen?
De volgende competentiegebieden worden met dit model bijzonder versterkt:
Expertise:
- Servomotor besturen
- Sensorwaarden uitlezen
- Drempelwaarden definiëren
- Variabelen en toestanden programmeren
Creativiteit:
- Ontwikkeling van eigen robotfiguren
- Plannen van individuele bewegingskarakters (bijv. hectisch, nieuwsgierig, slaperig)
- Ontwerpen van een "persoonlijkheid" door het bewegingsritme
- Creatieve interpretatie van sensorreacties
Sociaal gedrag:
- Samenwerking in kleine groepen
- Rollen wisselen tussen bouwen en coderen
Dit is nodig:
Materiaal:
- 1x Calliope mini 3
- 1x 180° servomotor
- 1x startkabel
- Karton & sjabloon van LOFI Robots (download)
- 2x paperclips
- Schroeven & moeren
Ook nuttig:
- Vouwbeen
- Onderlaag
- Laptop/tablet
Gereedschap:
- Schaar
- liniaal
- Schroevendraaier
Lesverloop:
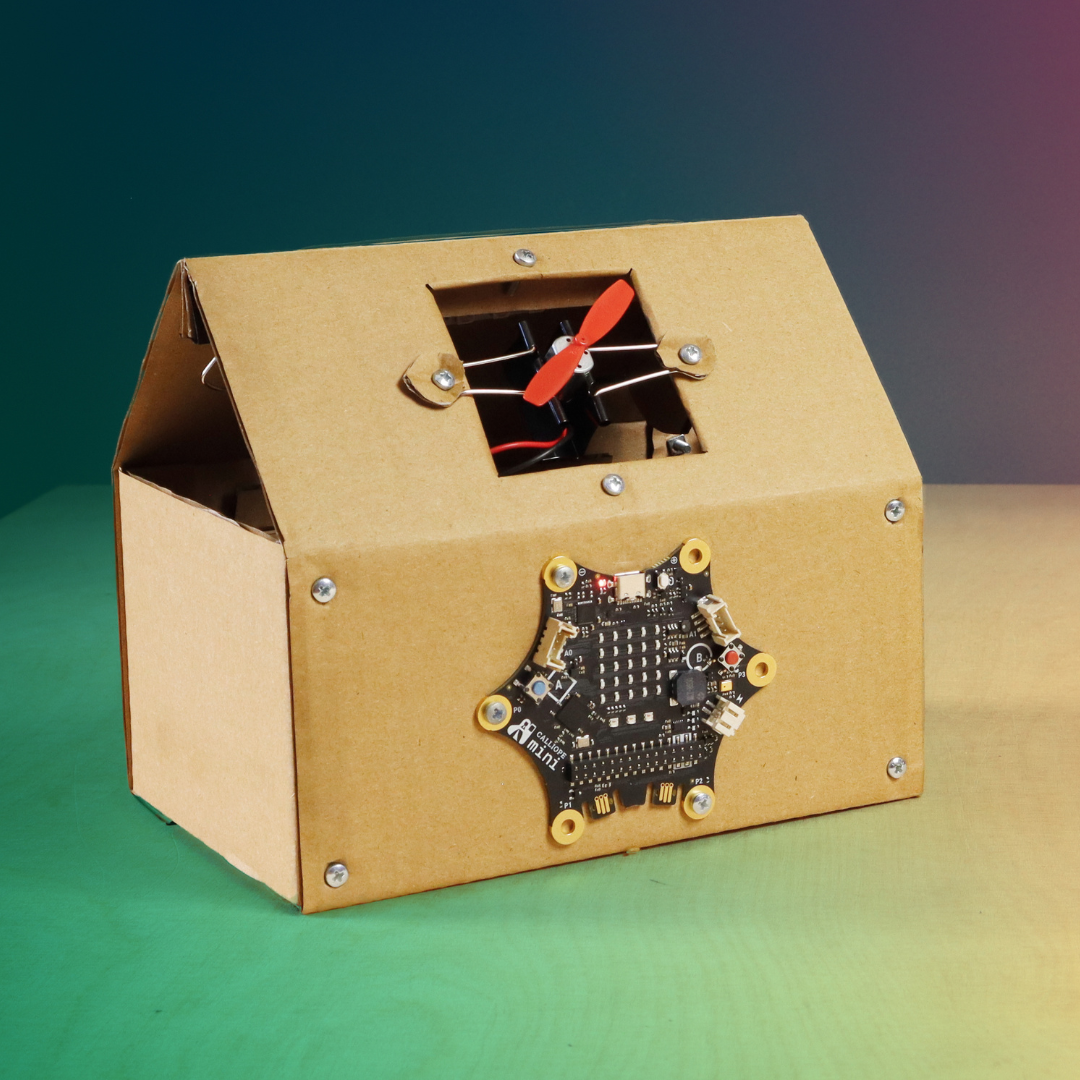
In het begin staat de constructie centraal. De leerlingen bouwen hun robot volgens een sjabloon en plaatsen de servomotor er precies in. Zo leren ze hoe mechanische beweging tot stand komt en hoe belangrijk een goede uitlijning en stabiele verbindingen zijn. De lespresentaties "Bouwinstructies & opbouw" en het afdruksjabloon "Robot" zijn hiervoor beschikbaar in de downloadsectie.
Na de mechanische opstelling wordt de servomotor aangesloten op de Calliope mini (GND - VCC - signaal naar P0) en gekalibreerd. Nu pas begint het programmeren.
In de eerste fase wordt de motor rechtstreeks via knoppen aangestuurd. Dit helpt leerlingen om de relatie tussen programmacode en beweging te begrijpen, die vervolgens wordt gebruikt als basis voor het integreren van sensoren: De "hongerige robot" gebruikt licht en magnetische waarden om te controleren of zijn voedsel "lekker" is. De "vermoeide robot" reageert op volume en schakelt tussen slapen en waken. Stap voor stap worden complexere bewegingspatronen gecreëerd met behulp van variabelen en richtingsveranderingen. Er zijn ook individuele leerdia's beschikbaar om de robot stap voor stap te begeleiden en door het programmeerproces te leiden.
Organisatie & sociale vorm
Een Calliope mini 3 en een 180° servomotor zijn nodig voor elke robot. Het is aan te raden om in teams van twee te werken. Tijdens de bouwfase werken beiden aan de constructie. In de programmeerfase werken de groepsleden om de beurt actief mee, zodat iedereen minstens één onderdeel van het programma zelf maakt of aanpast . Als de uitrusting beperkt is, kan een rotatiemodel worden gebruikt. Alle groepen werken aan hetzelfde product - differentiatie is gebaseerd op de diepte van de programmastructuur.

Tip:
Calliope biedt ook video-instructies en codevoorbeelden voor elke projectstap - ONTDEK NU!

HONGRYBOT/SLEEPYBOT: Stap voor stap
Kant-en-klare lespresentaties (PPTX) met MakeCode-voorbeelden en montage-instructies zijn beschikbaar als printsjablonen of lasergesneden sjablonen voor elke projectstap. Je vindt deze in het downloadgebied hieronder.
Bouw de robot → Bekijk de bouwinstructies & instellingen
- Download en print de sjablonen
- Knip en vouw het karton
- Plaats de servomotor
- Sluit de motor correct aan (P0)
- Kalibreer de motor
Motor besturen met knoppen of volume → Zie leerdia's Basics
- Knop A → Hoofd naar achteren
- Knop B → Hoofd vooruit
- Geen knop → Thuispositie
- Optioneel: Reactie op geluidsniveau
Hongerige robot - sensoren gebruiken → Zie lesdia's Hongerige robot
- De robot bepaalt zelf of het "eten" lekker is
- Gebruik van de lichtsensor
- Gebruik van de magnetometer
- Drempelwaarden bepalen
- Verschillende reacties programmeren
Veiligheidsaanwijzing: Plaats alleen geïsoleerde voorwerpen direct op de Calliope mini, niet-geïsoleerde voorwerpen kunnen kortsluiting veroorzaken. Om de magnetische kracht te meten is het voldoende om geleidende voorwerpen in de buurt te plaatsen.
Vermoeide robot - variabelen & toestanden → Zie leerdia's Vermoeide robot
- Variabel voor hoek
- Variabel voor bewegingsrichting
- Verandering van richting voor grenswaarden
- In- en uitschakelen van de "wake up" modus
Downloadgebied:

Gratis educatief materiaal:
Tip voor de procedure:
Voordat de eerste code geschreven wordt, moet de servomotor correct geïnstalleerd en gekalibreerd zijn . Als de robot mechanisch "vastzit", is zelfs de beste code nutteloos. Een correcte uitlijning van de servo en een stabiele montage zullen later veel tijd besparen bij het debuggen.

")

")


")
 100 stuks")
 zwart, 12 stuks")
 100 stuks")


{kind=link}