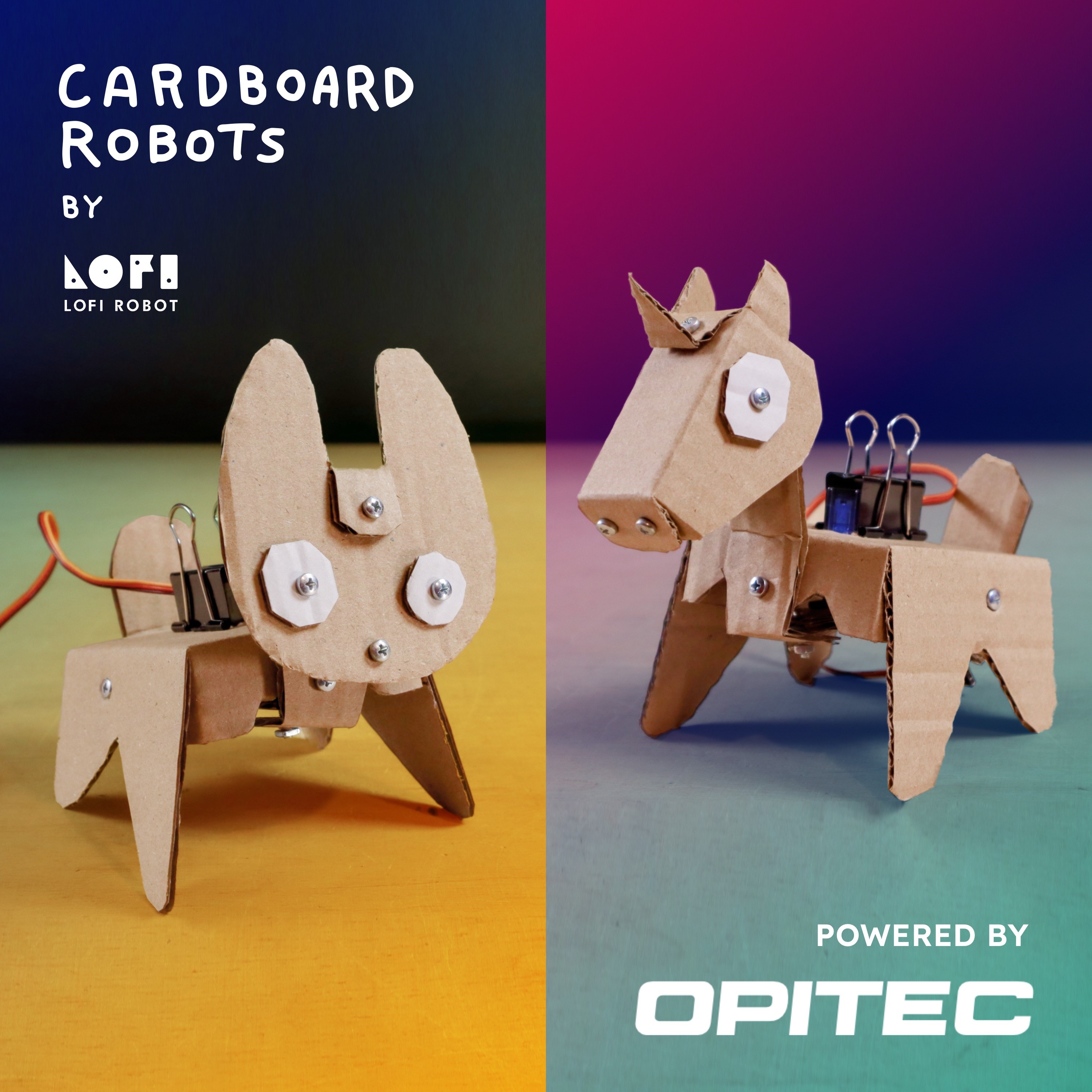
Hungriger Roboter & Müder Roboter



Interaktive Roboter aus Karton mit Calliope und LOFI Roots bauen und programmieren
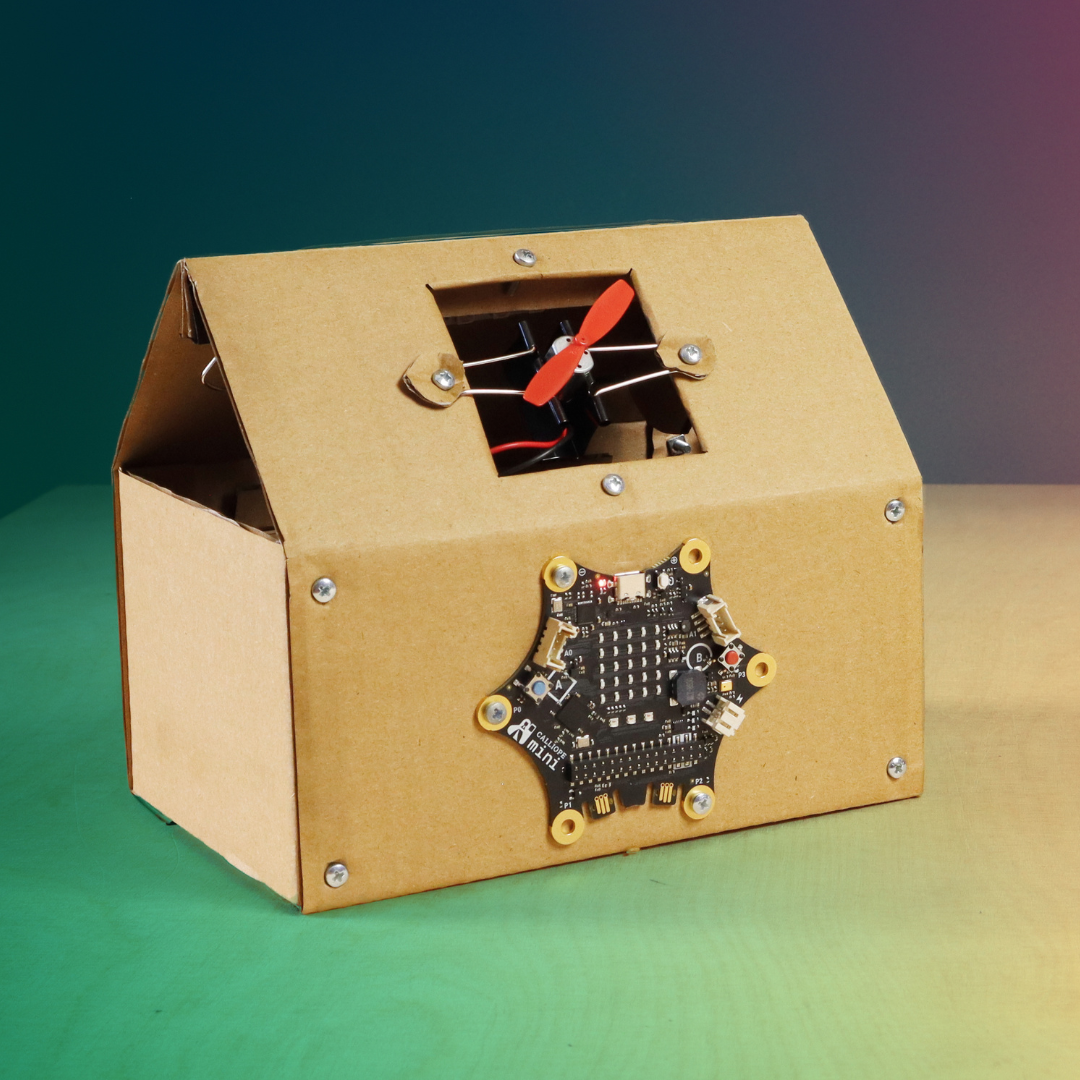
In diesem Projekt bauen Schülerinnen und Schüler ihren eigenen beweglichen „Hungrigen“ oder „Müden“ Roboter nach den Vorlagen von LOFI Roots. Der Kopf oder Kiefer wird mechanisch konstruiert und über einen 180°-Servomotor bewegt. Gesteuert wird alles mit dem Calliope mini – zunächst per Knopfdruck, später über Sensoren wie Licht, Magnetkraft oder Lautstärke. So entsteht ein interaktives Objekt, das auf seine Umgebung reagiert.
Mechanik, Gestaltung und Programmierung greifen sichtbar ineinander – und abstrakter Code wird zu echter Bewegung.
Zu jedem Projektschritt stehen von Callipe & Lofi fertige Unterrichtsfolien (PPT) sowie MakeCode-Beispiele und eine Videoanleitung zur Verfügung. ZUM UNTERRICHTSKONZEPT
Geeignet für:
ab Kasse: 5+
Alter ab 11+
Werken & Technik
MINT
Maker Space
Zeitrahmen:
4-6 Unterrichtsstunden
Lernbereich:
- Konstruktion mit Karton
- Mechanische Bewegungsübertragung
- Servomotoren ansteuern
- Ereignis- und Zustandslogik
- Sensorik (Licht, Magnetometer, Lautstärke)
- Problemlösen & Debugging
Was wird geschult?
Folgende Kompetenzbereiche werden mit diesem Modell besonders gestärkt:
Fachkenntnis:
- Servomotor ansteuern
- Sensorwerte auslesen
- Schwellenwerte definieren
- Variablen und Zustände programmieren
Kreativität:
- Entwicklung eigener Robotergestalten
- Planung individueller Bewegungscharaktere (z. B. hektisch, neugierig, schläfrig)
- Gestaltung einer „Persönlichkeit“ durch Bewegungsrhythmus
- Kreative Interpretation von Sensorreaktionen
Sozialverhalten:
- Kooperation in Kleingruppen
- Rollenwechsel zwischen Bau und Coding
Das wird benötigt:
Material:
- 1x Calliope mini 3
- 1x 180° Servomotor
- 1x Jumperkabel
- Karton & Vorlage von LOFI Robots (Download)
- 2x Papierklammern
- Schrauben & Muttern
Nützlich ist auch:
- Falzbein
- Unterlage
- Laptop/Tablet
Werkzeuge:
- Schere
- Lineal
- Schraubendreher
Unterrichtsablauf:
Zu Beginn steht die Konstruktion im Mittelpunkt. Die Schülerinnen und Schüler bauen ihren Roboter nach Vorlage auf und setzen den Servomotor präzise ein. Dabei erfahren sie, wie mechanische Bewegung entsteht und wie wichtig saubere Ausrichtung und stabile Verbindungen sind. Hierzu steht die Unterrichtspräsentationen "Bauanleitung & Setup" und die Druckvorlage "Roboter"im Downloadbereich zur Verfügung
Nach dem mechanischen Aufbau wird der Servomotor an den Calliope mini angeschlossen (GND – VCC – Signal an P0) und kalibriert. Erst jetzt beginnt die Programmierung.
In einer ersten Phase wird der Motor direkt über Tasten gesteuert. So verstehen die Lernenden den Zusammenhang zwischen Programmcode und Bewegung. Darauf aufbauend werden Sensoren eingebunden: Der „Hungrige Roboter“ prüft mithilfe von Licht- und Magnetwerten, ob sein Essen „lecker“ ist. Der „Müde Roboter“ reagiert auf Lautstärke und wechselt zwischen Schlaf- und Wachzustand. Schrittweise entstehen komplexere Bewegungsmuster durch Variablen und Richtungswechsel. Auch hierzu stehen jeweils einzelne Unterrichtsfolien zur Verfügung die Schritt für Schritt begleiten und durch die Programmierung führen.
Organisation & Sozialform
Pro Roboter werden benötigt wird je ein Calliope mini 3 und ein 180° Servomotor benötigt. Empfohlen wird die Arbeit in 2er-Teams. Während der Bauphase arbeiten beide an der Konstruktion. In der Programmierphase wechseln sich die Gruppenmitglieder aktiv ab, sodass jede Person mindestens einen Programmteil selbst erstellt oder verändert. Bei begrenzter Ausstattung kann ein Rotationsmodell eingesetzt werden. Alle Gruppen arbeiten am gleichen Produkt – die Differenzierung erfolgt über die Tiefe der Programmstruktur.

Tipp:
Zu jedem Projektschritt stehen bei Calliope auch eine Videoanleitung und Codebeispiele zur Verfügung - JETZT ENTDECKEN!

HUNGRYBOT/SLEEPYBOT: Step-by-Step
Zu jedem Projektschritt stehen fertige Unterrichtspräsentationen (PPTX) mit MakeCode-Beispiele sowie eine Aufbauanleitung als Druckvorlage oder als Lasercut Vorlage zur Verfügung. Diese findest du weiter unten im Downloadbereich.
Roboter aufbauen → Siehe Bauanleitung & Setup
- Vorlagen herunterladen und ausdrucken
- Karton zuschneiden und falten
- Servomotor einsetzen
- Motor korrekt anschließen (P0)
- Motor kalibrieren
Motor mit Tasten oder Lautstärke steuern → Siehe Unterrichtsfolien Grundlagen
- Taste A → Kopf nach hinten
- Taste B → Kopf nach vorne
- Keine Taste → Ausgangsposition
- Optional: Reaktion auf Geräuschpegel
Hungriger Roboter – Sensoren einsetzen → Siehe Unterrichtsfolien Hungriger Roboter
- Der Roboter entscheidet selbst, ob das „Essen“ lecker ist
- Nutzung des Lichtsensors
- Nutzung des Magnetometers
- Schwellenwerte definieren
- Unterschiedliche Reaktionen programmieren
Sicherheitshinweis: Ausschließlich isolierte Objekte direkt auf den Calliope mini legen, nicht isolierte Gegenstände können Kurzschlüsse verursachen. Für die Messung der Magnetkraft reicht es, leitende Objekte in die Nähe zu legen
Müder Roboter – Variablen & Zustände → Siehe Unterrichtsfolien Müder Roboter
- Variable für Winkel
- Variable für Bewegungsrichtung
- Richtungswechsel bei Grenzwerten
- Modus „aufwachen“ ein- und ausschalten
Downloadbereich:


Kostenfreies Bildungsmaterial:
Tipp zum Ablauf:
Bevor der erste Code geschrieben wird, sollte der Servomotor korrekt eingebaut und kalibriert sein. Wenn der Roboter mechanisch „hakt“, bringt auch der beste Code nichts. Eine saubere Ausrichtung des Servos und eine stabile Befestigung sparen später viel Debugging-Zeit.




")


")
 100 Stück")
")
 100 Stück")


{kind=link}