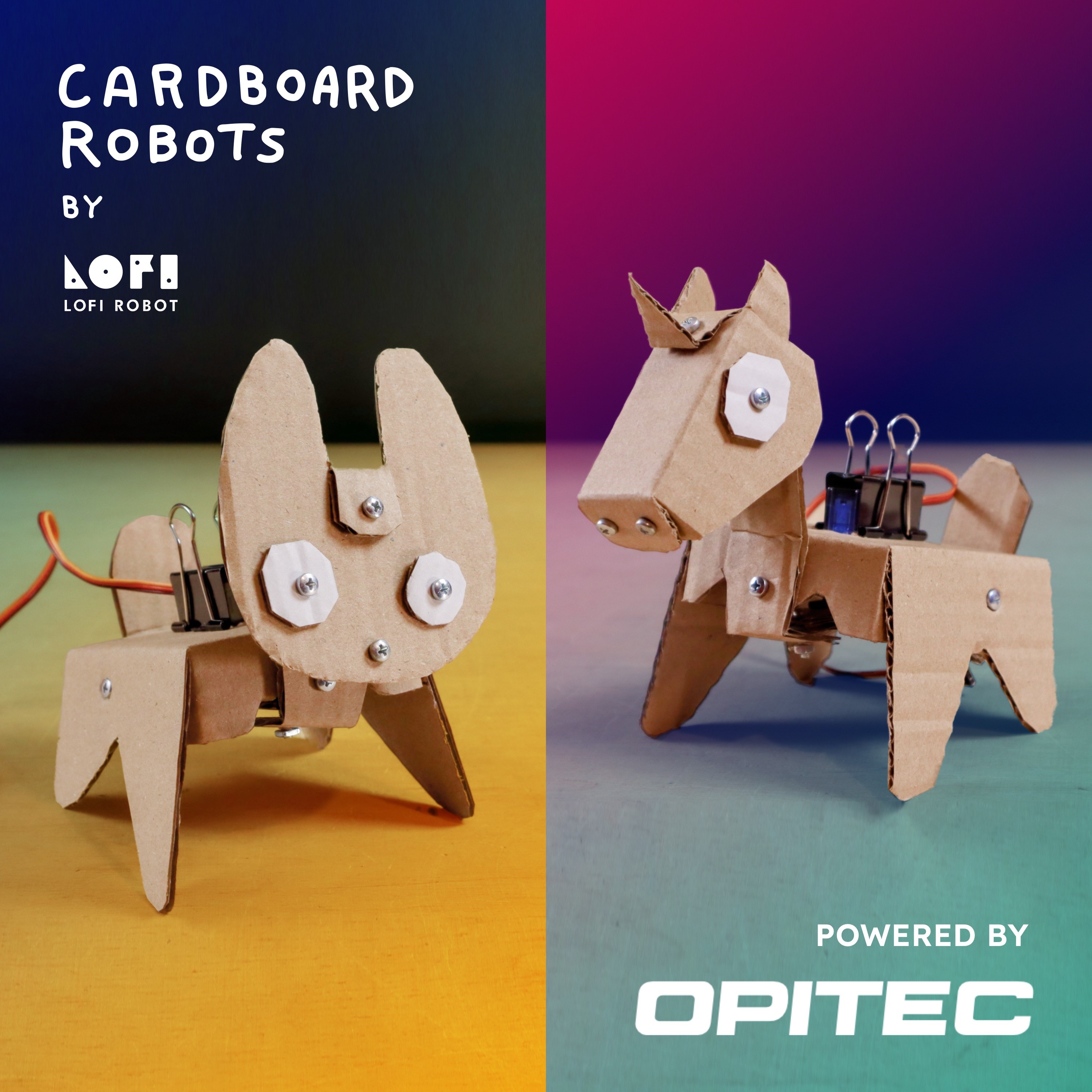
Robot hambriento y robot cansado



Construcción y programación de robots interactivos de cartón con Calliope y LOFI Roots
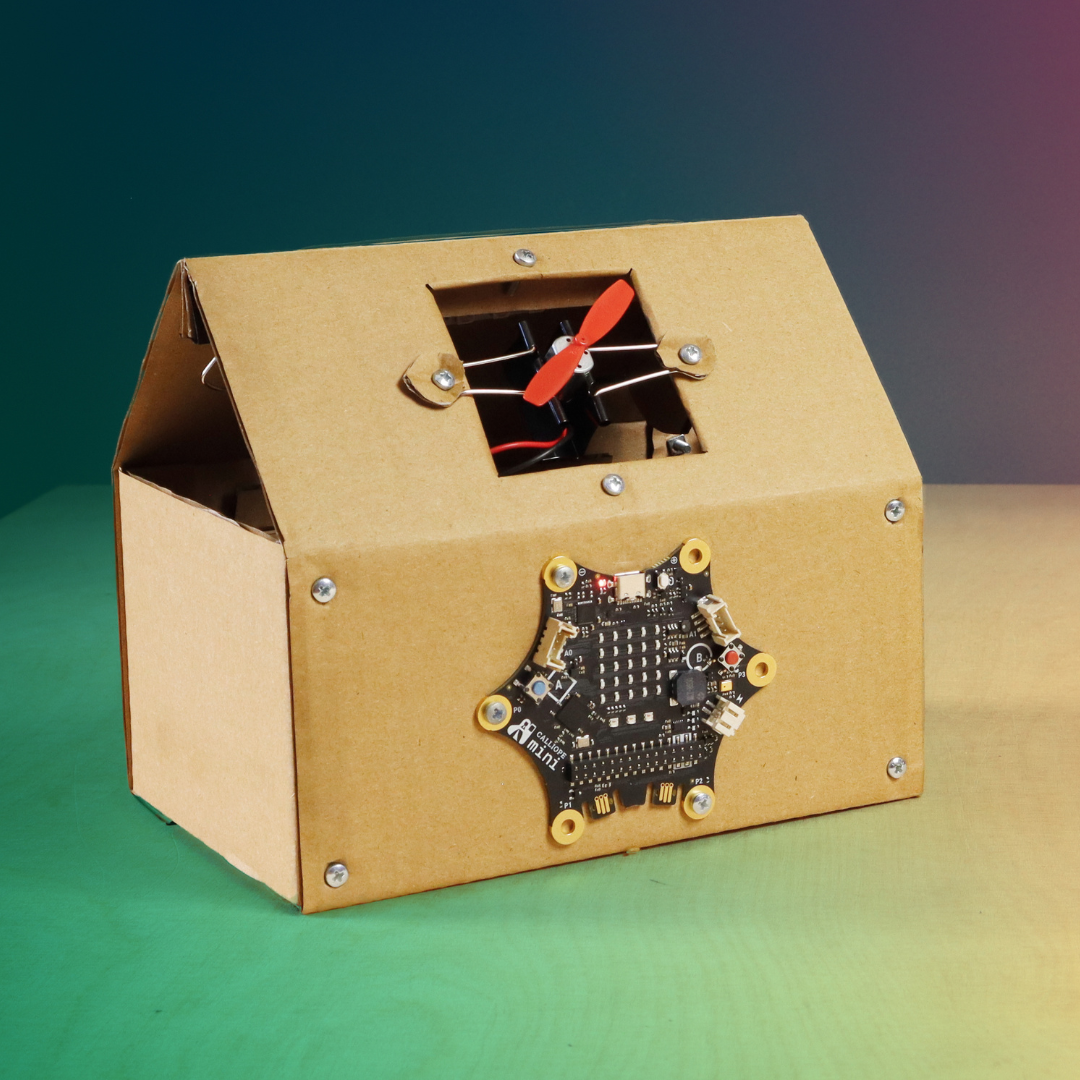
En este proyecto, los alumnos construyen su propio robot móvil "Hambriento" o "Cansado" basándose en los modelos LOFI Roots. La cabeza o mandíbula se construye mecánicamente y se mueve mediante un servomotor de 180°. Todo se controla con el Calliope mini: al principio pulsando un botón, más tarde mediante sensores como la luz, la fuerza magnética o el volumen, creando un objeto interactivo que reacciona a su entorno.
Mecánica, diseño y programación se entrelazan visiblemente, y el código abstracto se convierte en movimiento real.
Callipe & Lofi proporcionan diapositivas didácticas ya preparadas (PPT), así como ejemplos de MakeCode e instrucciones en vídeo para cada paso del proyecto. AL CONCEPTO DE ENSEÑANZA
Adecuado para:
desde la salida: 5+
11+ años
Manualidades y Tecnología
MINT
Espacio Maker
Periodo de tiempo:
4-6 lecciones
Área de aprendizaje:
- Construcción con cartón
- Transmisión mecánica del movimiento
- Control de servomotores
- Lógica de eventos y estados
- Sensores (luz, magnetómetro, volumen)
- Resolución de problemas y depuración
¿Qué se enseña?
Este modelo refuerza especialmente las siguientes áreas de competencia:
Experiencia:
- Controlar el servomotor
- Lectura de los valores de los sensores
- Definir valores umbral
- Programar variables y estados
Creatividad:
- Desarrollo de figuras robóticas propias
- Planificación de caracteres de movimiento individuales (por ejemplo, agitado, curioso, soñoliento)
- Diseño de una "personalidad" a través del ritmo de movimiento
- Interpretación creativa de las reacciones de los sensores
Comportamiento social:
- Cooperación en pequeños grupos
- Cambio de papeles entre la construcción y la codificación
Esto es lo que se necesita:
Material:
- 1x Calliope mini 3
- 1x servomotor de 180
- 1x cable puente
- Cartón y plantilla de LOFI Robots (descargar)
- 2x clips
- Tornillos y tuercas
También es útil:
- Hueso plegable
- Bajo
- Portátil/tableta
Herramientas:
- Tijeras
- regla
- Destornillador
Desarrollo de la clase:
Al principio, la construcción ocupa un lugar central. Los alumnos construyen su robot siguiendo una plantilla e insertan el servomotor con precisión. De este modo, aprenden cómo se crea el movimiento mecánico y lo importantes que son una alineación limpia y unas conexiones estables. Para ello, en el área de descargas están disponibles las presentaciones didácticas "Instrucciones de construcción y configuración" y la plantilla de impresión "Robot".
Tras la configuración mecánica, el servomotor se conecta al Calliope mini (GND - VCC - señal a P0) y se calibra. Sólo ahora comienza la programación.
En la primera fase, el motor se controla directamente mediante botones. Esto ayuda a los alumnos a comprender la relación entre el código del programa y el movimiento, que luego se utiliza como base para integrar los sensores: El "robot hambriento" utiliza valores luminosos y magnéticos para comprobar si su comida es "sabrosa". El "robot cansado" reacciona al volumen y alterna entre el sueño y la vigilia. Paso a paso, se crean patrones de movimiento más complejos utilizando variables y cambios de dirección. También hay disponibles diapositivas didácticas individuales para acompañar al robot paso a paso y guiarlo en el proceso de programación.
Organización y forma social
Para cada robot se necesita un Calliope mini 3 y un servomotor de 180 °. Se recomienda trabajar en equipos de dos personas. Durante la fase de construcción, ambos trabajan en la construcción. En la fase de programación, los miembros del grupo se turnan activamente para que cada uno cree o modifique por sí mismo al menos una parte del programa . Si el equipo es limitado, puede utilizarse un modelo de rotación. Todos los grupos trabajan sobre el mismo producto; la diferenciación se basa en la profundidad de la estructura del programa.

Consejo:
Calliope también proporciona instrucciones en vídeo y ejemplos de código para cada paso del proyecto .

HUNGRYBOT/SLEEPYBOT: Paso a paso
Las presentaciones didácticas (PPTX) con ejemplos de MakeCode e instrucciones de montaje están disponibles como plantillas para imprimir o plantillas cortadas con láser para cada paso del proyecto. Puede encontrarlas en el área de descargas más abajo.
Construye el robot → Consulta las instrucciones de construcción y configuración
- Descarga e imprime las plantillas
- Corta y dobla el cartón
- Inserta el servomotor
- Conecta el motor correctamente (P0)
- Calibra el motor
Controla el motor con los botones o el volumen → Ver diapositivas didácticas Conceptos básicos
- Botón A → Cabeza hacia atrás
- Botón B → Cabeza hacia delante
- Sin botón → Posición inicial
- Opcional: reacción al nivel de ruido
Robot hambriento: uso de sensores → Ver diapositivas didácticas Robot hambriento
- El robot decide por sí mismo si la "comida" es sabrosa
- Uso del sensor de luz
- Uso del magnetómetro
- Definir valores umbral
- Programar diferentes reacciones
Nota de seguridad: Coloque únicamente objetos aislados directamente sobre el Calliope mini, los objetos no aislados pueden provocar cortocircuitos. Para medir la fuerza magnética, basta con colocar cerca objetos conductores
Robot cansado - variables y estados → Ver diapositivas didácticas Robot cansado
- Variable para el ángulo
- Variable para la dirección del movimiento
- Cambio de dirección para los valores límite
- Activar y desactivar el modo "despertar"
Área de descargas:


Material educativo gratuito:
Consejo sobre el procedimiento:
Antes de escribir el primer código, el servomotor debe estar correctamente instalado y calibrado . Si el robot está mecánicamente "atascado", incluso el mejor código es inútil. Una alineación correcta del servo y un montaje estable ahorrarán mucho tiempo de depuración más adelante.


")
")



")





{kind=link}