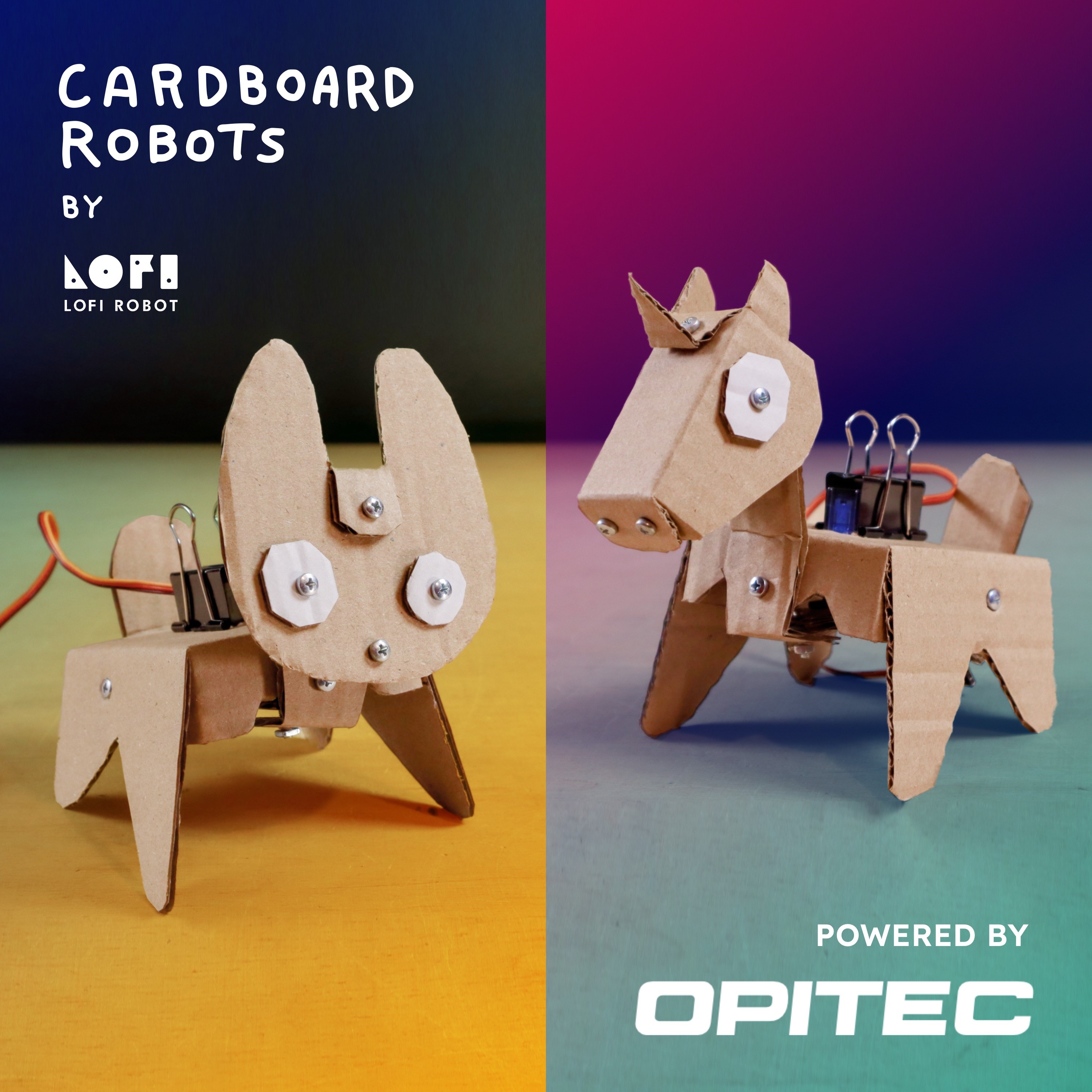
Robot affamato e robot stanco



Costruire e programmare robot interattivi di cartone con Calliope e LOFI Roots
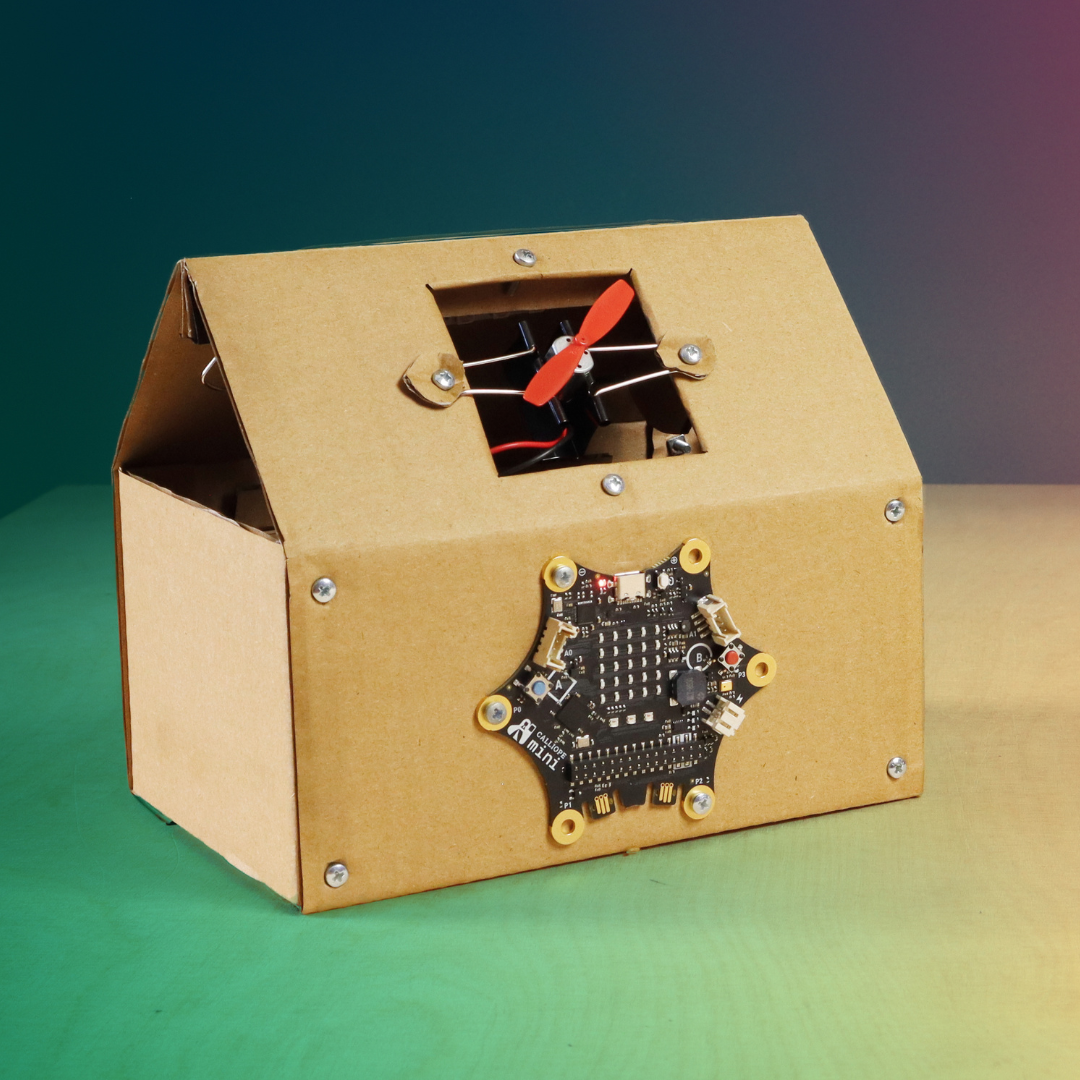
In questo progetto, gli alunni costruiscono il proprio robot mobile "Affamato" o "Stanco" basandosi sui modelli LOFI Roots. La testa o la mascella sono costruite meccanicamente e vengono mosse da un servomotore a 180°. Tutto viene controllato con il Calliope mini: inizialmente con la semplice pressione di un pulsante, successivamente tramite sensori come la luce, la forza magnetica o il volume, creando un oggetto interattivo che reagisce all'ambiente circostante.
Meccanica, design e programmazione sono visibilmente intrecciati e il codice astratto diventa movimento reale.
Callipe & Lofi forniscono diapositive didattiche già pronte (PPT), esempi di MakeCode e istruzioni video per ogni fase del progetto. AL CONCETTO DI INSEGNAMENTO
Adatto per:
dalla cassa: 5+
Età 11+
Artigianato e tecnologia
MINT
Spazio Maker
Periodo di tempo:
4-6 lezioni
Area di apprendimento:
- Costruzione con cartone
- Trasmissione meccanica del movimento
- Controllo dei servomotori
- Logica degli eventi e degli stati
- Sensori (luce, magnetometro, volume)
- Risoluzione di problemi e debug
Cosa viene insegnato?
Questo modello rafforza in modo particolare i seguenti ambiti di competenza:
Competenze:
- Controllo del servomotore
- Leggere i valori dei sensori
- Definire i valori di soglia
- Programmare variabili e stati
Creatività:
- Sviluppo di figure robotiche proprie
- Pianificazione di caratteri di movimento individuali (ad es. frenetico, curioso, assonnato)
- Progettazione di una "personalità" attraverso il ritmo del movimento
- Interpretazione creativa delle reazioni dei sensori
Comportamento sociale:
- Cooperazione in piccoli gruppi
- Scambio di ruoli tra costruzione e codifica
Ecco cosa serve:
Materiale:
- 1x Calliope mini 3
- 1x servomotore 180°
- 1x cavo jumper
- Cartone e modello di LOFI Robots (da scaricare)
- 2x graffette
- Viti e dadi
Utile anche:
- Osso pieghevole
- Sottostrato
- Laptop/tablet
Strumenti:
- forbici
- righello
- Cacciavite
Svolgimento della lezione:
All'inizio, la costruzione è al centro dell'attenzione. Gli alunni costruiscono il loro robot secondo un modello e inseriscono con precisione il servomotore. In questo modo imparano come si crea il movimento meccanico e quanto siano importanti un allineamento pulito e collegamenti stabili. A tale scopo, nell'area download sono disponibili le presentazioni didattiche "Istruzioni di costruzione e configurazione" e il modello di stampa "Robot".
Dopo la messa a punto meccanica, il servomotore viene collegato a Calliope mini (GND - VCC - segnale a P0) e calibrato. Solo ora inizia la programmazione.
Nella prima fase, il motore viene controllato direttamente tramite pulsanti. Questo aiuta gli allievi a capire la relazione tra codice di programma e movimento, che viene poi utilizzata come base per l'integrazione dei sensori: Il "robot affamato" utilizza valori luminosi e magnetici per verificare se il suo cibo è "gustoso". Il "robot stanco" reagisce al volume e passa dal sonno alla veglia. Passo dopo passo, vengono creati modelli di movimento più complessi utilizzando variabili e cambi di direzione. Sono disponibili anche diapositive didattiche individuali che accompagnano il robot passo dopo passo e lo guidano nel processo di programmazione.
Organizzazione e forma sociale
Per ogni robot sono necessari un Calliope mini 3 e un servomotore a 180°. Si consiglia di lavorare in squadre di due persone. Durante la fase di costruzione, entrambi lavorano alla costruzione. Nella fase di programmazione, i membri del gruppo si alternano attivamente in modo che ognuno crei o modifichi da sé almeno una parte del programma. Se l'attrezzatura è limitata, si può usare un modello a rotazione. Tutti i gruppi lavorano sullo stesso prodotto - la differenziazione si basa sulla profondità della struttura del programma.

Suggerimento:
Calliope fornisce anche istruzioni video ed esempi di codice per ogni fase del progetto - SCOPRI ORA!

HUNGRYBOT/SLEEPYBOT: passo dopo passo
Sono disponibili presentazioni didattiche pronte per l'uso (PPTX) con esempi di MakeCode e istruzioni di montaggio, come modelli da stampare o da tagliare al laser per ogni fase del progetto. Le trovate nell'area download qui sotto.
Costruire il robot → Vedere le istruzioni per la costruzione e la configurazione
- Scaricare e stampare i modelli
- Tagliare e piegare il cartone
- Inserire il servomotore
- Collegare correttamente il motore (P0)
- Calibrare il motore
Controllare il motore con i pulsanti o il volume → Vedere le diapositive didattiche Nozioni di base
- Pulsante A → Testa all'indietro
- Pulsante B → Testa in avanti
- Nessun pulsante → Posizione di partenza
- Opzionale: reazione al livello di rumore
Robot affamato - utilizzo di sensori → Vedi diapositive della lezione Robot affamato
- Il robot decide da solo se il "cibo" è saporito
- Uso del sensore di luce
- Uso del magnetometro
- Definire i valori di soglia
- Programmare diverse reazioni
Nota di sicurezza: posizionare solo oggetti isolati direttamente sul Calliope mini, gli oggetti non isolati possono causare cortocircuiti. Per misurare la forza magnetica, è sufficiente posizionare oggetti conduttivi nelle vicinanze.
Robot stanco - variabili e stati → Vedere diapositive didattiche Robot stanco
- Variabile per l'angolo
- Variabile per la direzione del movimento
- Cambio di direzione per i valori limite
- Attivazione e disattivazione della modalità "wake up
Area di download:


Materiale didattico gratuito:
Suggerimento sulla procedura:
Prima di scrivere il primo codice, il servomotore deve essere installato e calibrato correttamente . Se il robot è meccanicamente "bloccato", anche il miglior codice è inutile. Un allineamento corretto del servo e un montaggio stabile risparmieranno molto tempo di debug in seguito.








")




{kind=link}